Large Scale Application of J-1939 CAN

Large Scale Application of J-1939 CAN
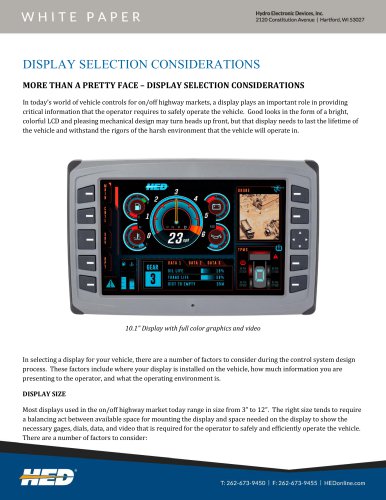
This document provides guidance for engineers on applying the SAE J-1939 protocol to systems with high input/output counts and numerous nodes. It discusses the differences between various SAE "J" specifications for CAN and outlines design parameters for developing robust systems.
CAN (Controlled Area Network) was developed by Bosch in the 1980s, allowing multiple microprocessor units to communicate over the same wires. J-1939, a 250 K Baud CAN system, was designed for heavy trucks and off-highway vehicles, replacing J1587/J1708 with higher bandwidth.
J-1939 uses a shielded twisted pair for trucks and buses, and a twisted non-shielded quad for construction/agricultural applications. It includes a message priority identifier and error detection mechanisms. Systems are limited to 30 nodes per segment with a maximum backbone length of 40 meters.
"Registered" addresses are standardized, while "Proprietary" addresses cater to specific requirements not met by registered addresses. Dual CAN systems can accommodate both types, with bridges or ECUs translating between them.
SAE J-1708 and J-1850 are older protocols for heavy trucks and cars, respectively. CAN Kingdom and CAN 2.0B offer additional flexibility and compatibility with other systems.
J-1939 is widely used in trucks for engine, transmission, and ABS coordination, as well as in fire and rescue apparatus, aerial work platforms, road building equipment, and railroad maintenance machines.
CAN is beneficial for systems with more than three nodes. For fewer nodes, other communication methods may be more cost-effective. J-1939 is preferred for its flexibility and fault tolerance.
J-1939 is replacing older protocols and is being adopted in various heavy-duty and off-highway applications. Efforts are underway to reduce the cost of CAN transmitting sensors.
J-1939 systems are designed to withstand harsh conditions, with protections against voltage spikes and EMI/RFI interference. Modules should operate within specified temperature ranges and be easy to troubleshoot.
J-1939 offers a fault-tolerant communication system that supports modular design and simplifies manufacturing and troubleshooting processes. It provides significant advantages for equipment manufacturers and operators.
The document discusses the advantages of using a Controller Area Network (CAN) system in machinery. Key benefits include protection against misuse, notification of service intervals, fault detection, and maintenance logging. Technicians can easily access fault histories and maintenance records via a laptop connection.
The CAN system allows for customizable settings through password protection, enabling different levels of access for operators, dealers, and engineers. The system can log machine usage data, such as load capacity and operational hours, which can be password-protected.
The document outlines the limitations of the SAE J-1939 standard, which supports up to 30 nodes and 255 inputs/outputs per node. Practical applications typically use fewer inputs/outputs per node to avoid excessive connectors and heat generation.
Predictions include increased data rates, more registered codes for new power sources, and the introduction of fiber optic versions for environments with high EMI/RFI. The document warns against overloading machines with features that operators may not use due to complexity.
The cost of implementing CAN J-1939 is expected to decrease as technology advances and specific-purpose modules become more common. The document compares this trend to the evolution of pilot pressure control valves in construction equipment.
The adoption of CAN J-1939 is growing, with benefits such as robust design, reliability, self-diagnostics, and ease of installation. The document anticipates that CAN will become the predominant communication mode for multi-module machines.
Contact details for key personnel at Hydro Electronic Devices, Inc. are provided for further inquiries.
The document includes a glossary of terms related to CAN systems, such as ABS, ECU, EMI/RFI, and others.
Catalog excerpts

Large Scale Application of J-1939 CAN Edward T. Heck, John Kitzerow, Tony Caravella HED (Hydro Electronic Devices, Inc.) Copyright © 1999 Society of Automotive Engineers, Inc. ABSTRACT This paper provides a roadmap for engineers wanting to apply SAE J-1939 to applications requiring high input/output counts and a high number of nodes. The differences of the various SAE “J” specifications for CAN will be discussed. There are brief descriptions of some of the terms and standards involved. Coverage of the design parameters and decisions that have to be made to develop a survivable system will be outlined. The decision process on the use of “Proprietary” and “Registered J-1939 is analyzed. Methods of achieving high flexibility as well as the future directions of J-1939 and typical applications are addressed in relation to engineering flexibility, product standardization, parts rationalization, service, and customer convenience. WHAT IS “CAN” J-1939? CAN stands for Controlled Area Network. The CAN protocol was developed by Bosch in the early 1980s. The significant feature of CAN networks is that multiple microprocessor based units can communicate with each other over the same pair of wires. CAN J-1939 was developed to provide a 250 K Baud CAN system for use on heavy trucks and off-highway vehicles. The first SAE J-1939 standards were released in 1994- over five years ago, a long time in electronics! SAE J-1939 was designed to replace J1587/J1708 with a higher bandwidth system. J-1939 DESIGN \ Fig. 1, CAN cables. The 110 ohm termination resistors and twisting of the data pair make the data communication pair very EMI/RFI tolerant. (Resistors should be sized for 400 mW) CAN J-1939 was designed to be used two ways: for truck and bus applications, the communication media is a shielded twisted pair with a drain that requires a termination resistor at each end (CAN_H and CAN_H); for construction/agricultural, the communication media that is a twisted non-shielded quad (CAN_H, CAN_L, CAN_BAT, and CAN_GND). The use of the CAN_H and CAN_L concept for the communication pair also contributes to the robustness of the communication scheme. J-1939 also contains a message priority identifier in the first three bits of the 29 bit identifier field. A message of 000 is the highest priority. This priority feature allows the higher priority messages to displace “maintenance” messages. The J1939 protocol also includes collision detection and arbitration (CSMA/CD Carrier Sense, Multiple Access with Collisio
Open the catalog to page 1
purpose heavy duty trucks and most Off-Highway vehicles have requirements not met by the “Registered” addresses. To address these requirements, the use of “Proprietary” addresses is adopted. To avoid conflict, it is strongly suggested that “Registered” and “Proprietary” codes not be used on the same segment. Vehicles with both types of code can accommodated through the use of dual CAN systems. One system talks only to the “Registered” code nodes and the other system talks only to the “Proprietary” code nodes. Several J-1939 CAN system manufacturers currently offer Bridges and/or ECUs that contain...
Open the catalog to page 2
approach can be quite efficient for that manufacturer, addition of components from a different manufacturer is very difficult. TYPICAL APPLICATIONS The J-1939 specification is initially being applied in volume on trucks. The system is being used for engine, transmission, and ABS brake coordination. There is also a number of applications being introduced for Tractor to Trailer communications. Fig 7, Aerial Work Platform Application. Road building equipment is quite often offered in a multitude of variations as many options are added to the base machine. The use of J-1939 allows the pre-wiring...
Open the catalog to page 3
Deere are like J-1939. Though, there is some discussion as to which came first. J-1939 is currently 250 kbps with several companies looking at the feasibility of speeds up to 1,000 kbps for distances up to 40 meters. There has been little work to place CAN transmitting sensors on the CAN backbone because they often cost up to ten times more than existing analog sensors. Many of the sensor manufacturers have programs to change this over the next few years. Until then, sensors will be wired to nodes that will have a number of sensor inputs as well as other functions. Most CAN transmitting sensors...
Open the catalog to page 4
individual characteristics when pin identification is used. Pin identification is the use of on-off input pins wired to either battery or ground to tell the module what software it should use to operate in that particular position. The number of different identifiable positions is limited by the number of input pins available. The number of different identifications is 2 to the power of the number of available pins, less 1. Thus, eight pins yields 255 different positions. slightly higher cost, you will save far more dollars by not having to try to explain sinking outputs to someone over the telephone....
Open the catalog to page 5
to reduce swing speed but not increase it beyond the factory setting. The dealer may be allowed to increase the swing speed by a maximum of 10 percent. The factory service representative may be allowed to increase the factory setting by 20 percent using a different password. The design engineer using yet another password may have no limits place on him. HOW TO DESIGN AN IMPROBABLY COMPLEX MACHINE The formula is simple. There is a limit of 30 nodes with a practical limit of 255 inputs/outputs per node. This means that if there is a machine with over 7,650 input/outputs, it may have exceeded the...
Open the catalog to page 6
ABS- Anti-skid Braking System Back EMF- a negative spike created on a supply line when an electrical load is disconnected. Backbone- the main CAN connection line Baud- one bit of data CAN- Controller Area Network CAN Kingdom- A CAN protocol used in Europe Devicenet- A CAN protocol ECU- Electronic Control Unit EMF- Electro Motive Force EMI/RFI- Electro Magnetic Interference/ Radio Frequency Interference GPS-Global Positioning System Kbps- Kilo baud per second Modules- CAN transmitter/receiver units that may also have inputs and outputs Node- The connection point for modules Password- a specific...
Open the catalog to page 7All HED Inc. catalogs and technical brochures
 HED Application
HED Application12 Pages
 Basic Electronics
Basic Electronics32 Pages
 CAN and Multiplexing
CAN and Multiplexing30 Pages